距離センサーは物体までの距離を主に光と音波を利用して計測することができます。
自動運転車でも、周囲にある障害物や人などとの距離を計測して安全運転ができるようになっています。
距離センサー
距離センサーの種類
赤外線LED方式

比較的安価ですが、ほこりなど空気中が汚れていたりすると反射光が減衰してしまいます。
照射光は広がりがあるので遠ざかると減衰していきます。
計測距離は製品にもよりますが約10~80㎝です。

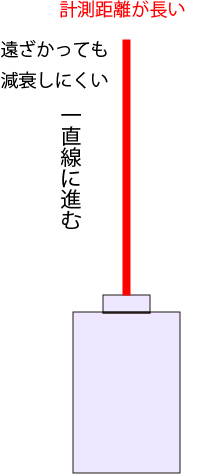
レーザー方式

ほこりなど空気中が汚れていたりすると反射光が減衰してしまいます。収束した光なので対象物1点の距離を高精度で求めることができます。
一直線に光が出ているので計測距離が長く遠ざかっても光が減衰しにくいです。
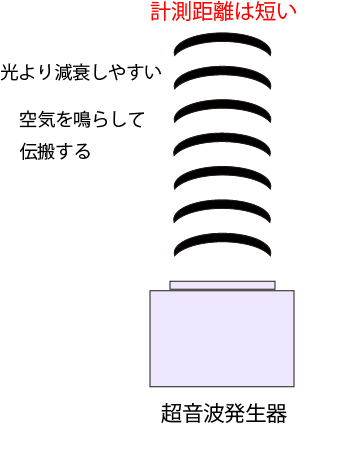
超音波方式

ほこりなどが多くても使えますが、超音波の特性上空気が薄い場所だと使用できません。
伝達速度は光に比べて低速です。長距離の計測には向いていません。
市販されている主な距離センサー製品
シャープ 距離センサー GP2Y0A021YKF6
出力/通信方式 : アナログ
リンク
商品名・データシートはこちら(外部リンク)
LIDAR-Lite v3HP ハイパフォーマンス 光学距離センサー IPX7 対応
出力/通信方式 : I2C、パルス
リンク
Maxbotix LV-MaxSonar-EZ1 ソナーレンジファインダー MB1010 超音波センサー
出力/通信方式 : アナログ、パルス、UART
リンク
商品名タイトル
出力/通信方式 : ここに書く
もしものコードを貼りつけ
商品名・データシートはこちら(外部リンク)