
超小型マイコンボード「micro:bit(マイクロビット)」でリモコンバギー!
入門向けマイコンボードとして人気を集めているmicrobit(マイクロビット)。小さいながらにして、傾きセンサーや温度センサー、LED表示板を搭載し、makecodeというオンラインのサイトで簡単にプログラミングもできて初心者でも簡単にコントロールできることから、Fabshopでも沢山紹介しています。
このmicrobitには様々な応用キットが発売されていますが、今回はmicro:bitを扱っているkitronik社製「ライントレース&リモートコントロールバギー ver.2.0」の組み立てからテスト走行までをご紹介します。今後リモートコントロールや傾きセンサでのコントロールなどを紹介していきます。

作ってみよう、microbitでコントロールするバギー!
このキットには、microbit本体以外の必要なすべての部品が搭載されています。microbit本体は同梱されていないため別売りのmicrobit本体を購入します。microbitは2台用意することで、リモートコントロールも楽しめます。
まずは本体を制作します。
キットに同梱されているのは、以下の通りです。
【キット内容】
- 2 ×ギア付きモーター(黄色)
- 2 ×タイヤホイール
- 1 × micro:bit 用モータードライバーボード V2
- 1 × キャスターメタルボール 16mm
- 1 × スイッチ付き単三電池ボックス.
- 1 × ラインフォローボード
- 1 × 樹脂製バギーシャーシ.
- 1 × 樹脂製マウンタ.
- 1 × 1mm x 12mm x 25mm Foam Pad.
- 4 × プラスチックスペーサー 20mm.
- 12 × M3 ビス 6mm
- 4 × ビス M3 10mm
- 10 × M3 ナット
- 4 × プラスチック M3 スタンドオフ M/F.
- 2 × ビス M3 30mm
- 10 × ジャンプワイヤー 20cm オス/メス.
- 1 × 15cm リード線(黒)
- 1 × 15cm リード線(白)
- 1 × 15cm リード線(緑)
- 1 × 15cm リード線(青)

【別途用意するもの】
※以下は同梱されていません。別途ご用意ください。
- microbit本体
- 単三電池4本
- はんだごて はんだ
- ドライバー
- ストリッパー
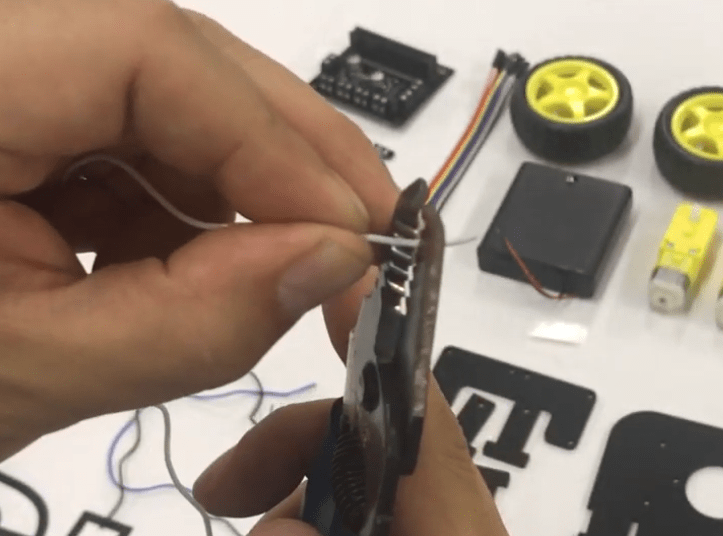
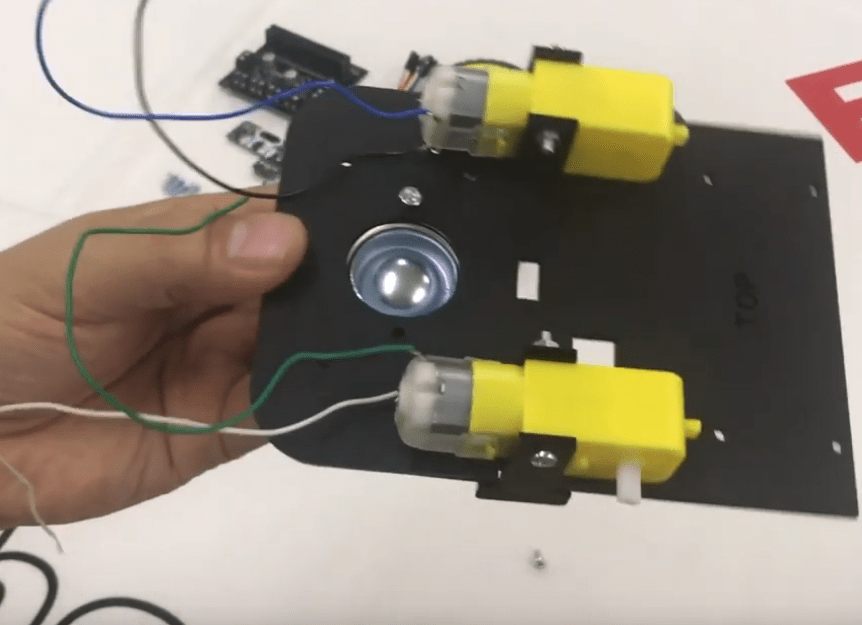
【STEP.1】リード線の被覆を取る。
まずあは、付属の「青」「緑」「白」「黒」のリード線の両端の被覆を向きます。2~3cm程度被覆をむいて、モータにしっかりと結びつけます。
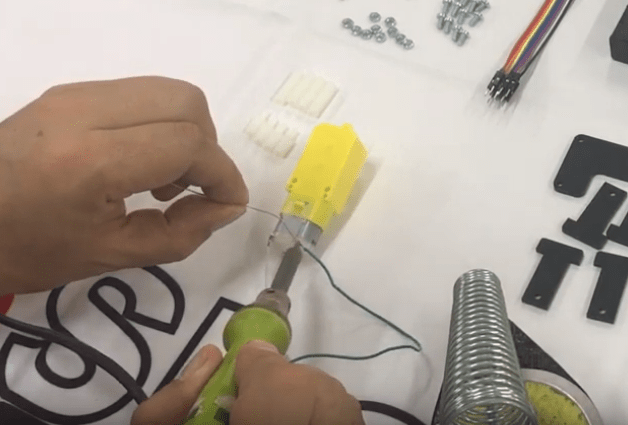
【STEP.2】モーター端子にリード線をはんだ付けする
はんだ付けの際には、モータに巻いたリード線にはんだゴテをしっかりとあてて、はんだを溶かしていきます。
【STEP.3】シャーシ本体にモータを取り付ける
シャーシ本体に2つのモーターを取り付けます。今回はあまりきつくしなくても取れないくらいある程度しっかりついていれば十分です。完成後にラジオペンチで押さえながらしっかりとドライバーで回してください。
【STEP.4】後輪をシャーシにつける。
バギーには、2つのタイヤとボール状の1つの後輪が付属しています。この後輪部分をねじ止めします。
【STEP.5】モーターコントローラ用マウンタを付ける
白い4本のマウンタを後輪車輪の上に立てます。この上にモーターコントローラーを搭載します。
【STEP.6】モーターコントローラーをマウントします。
先ほど立てたマウンタにモーターコントローラーをビス止めします。
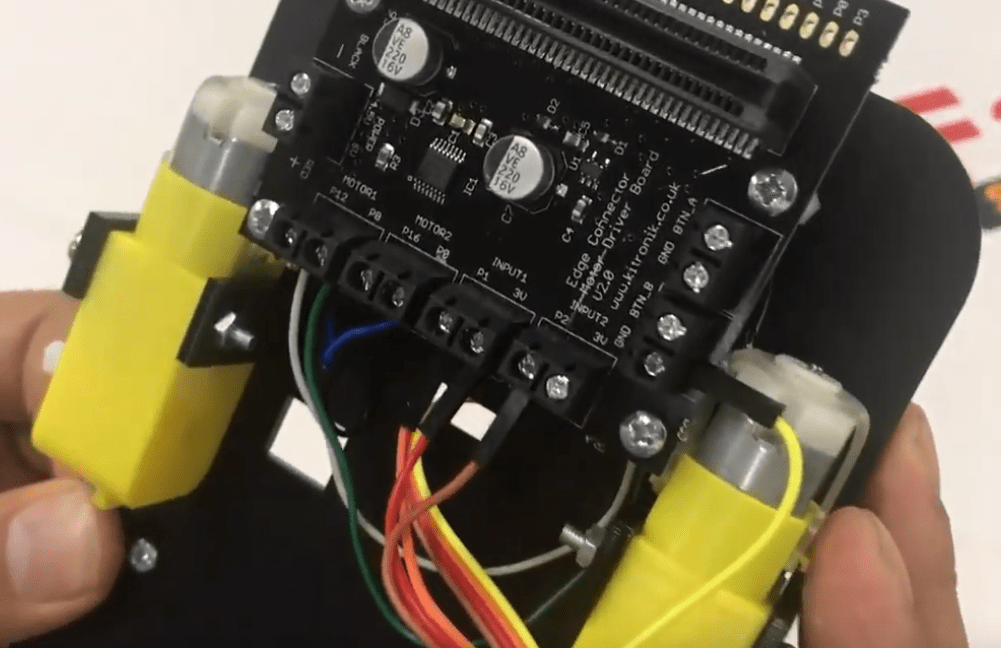
【STEP.7】モーターとコントローラーを接続します。
モーターから2本ずつ出ている線をモーターコントローラーに接続します。配線の色と接続するポートに気を付けて接続します。完成した際のテストで回転の向きがおかしい場合はこの「Moter1」「Moter2」への配線をチェックします。
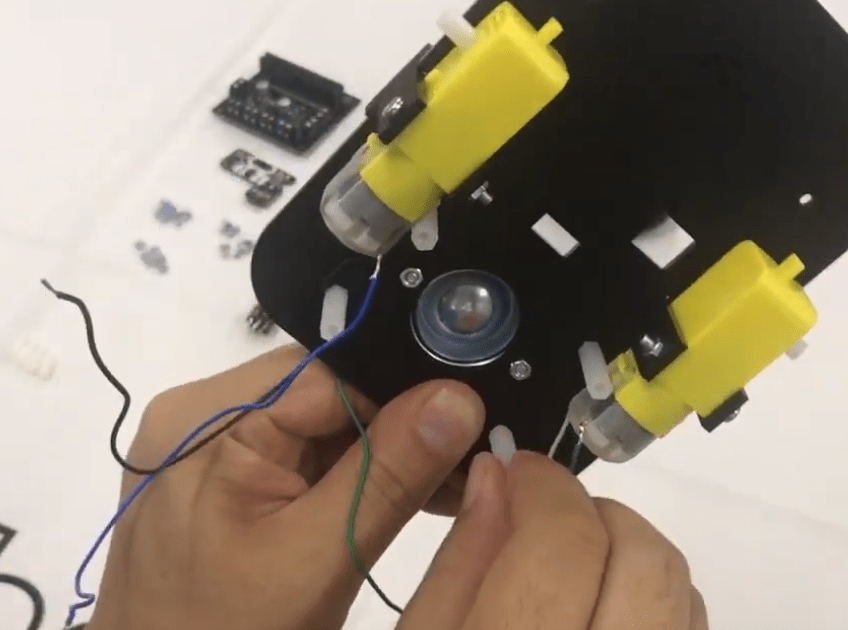
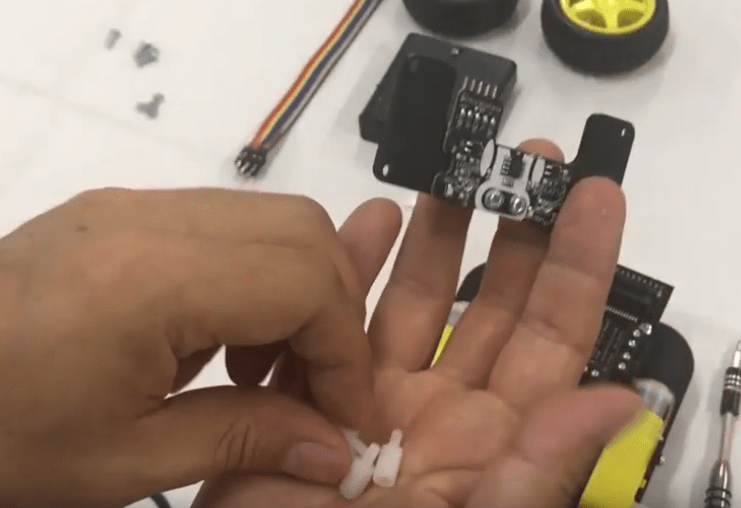
【STEP.8】色センサをマウンタに付け足を付ける。
黒いマウンタに2本のネジでセンサ―ボードを接続ビス止めします。その後4つの白い足をそれぞれ接続します。
【STEP.9】照度センサーをシャーシにビス止め
4つの足を付けた照度センサーのマウンタをシャーシにビス止めします。
【STEP.10】センサボードにジャンプワイヤーを接続
4本のケーブルがまとまっているオスーメスのジャンプワイヤーをセンサボードに取付、後輪のすぐ下にあるシャーシの穴からシャーシ上部に配線していきます。
【STEP.11】モーターコントローラーとセンサーの接続
モーターコントローラーボードとセンサーからの配線を接続します。写真では黄色い線をGNDに、P2に茶色、3Vに赤、P1にオレンジを接続しています。プラスドライバを回してコネクタに噛ませます。
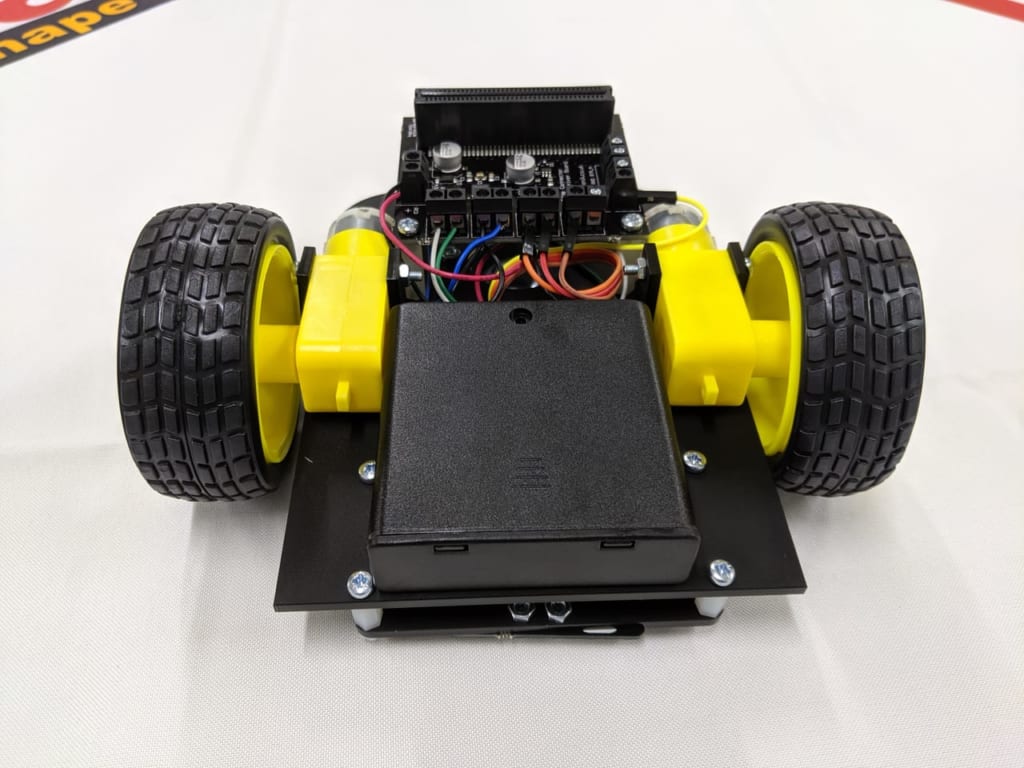
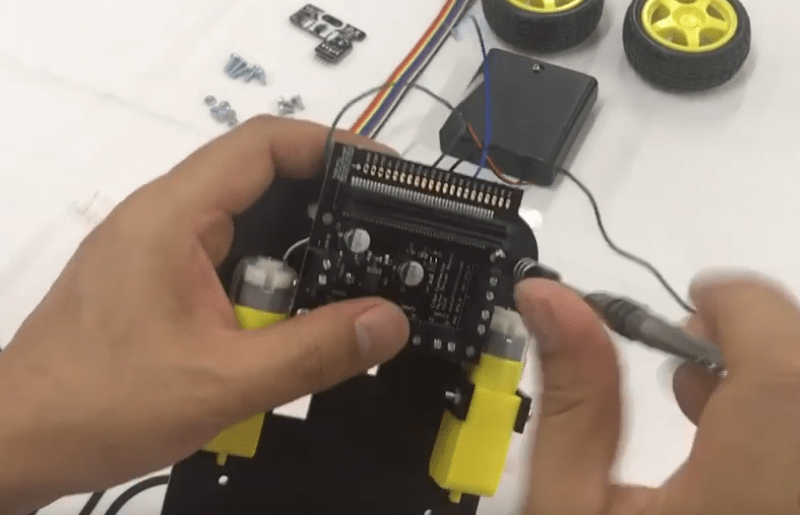
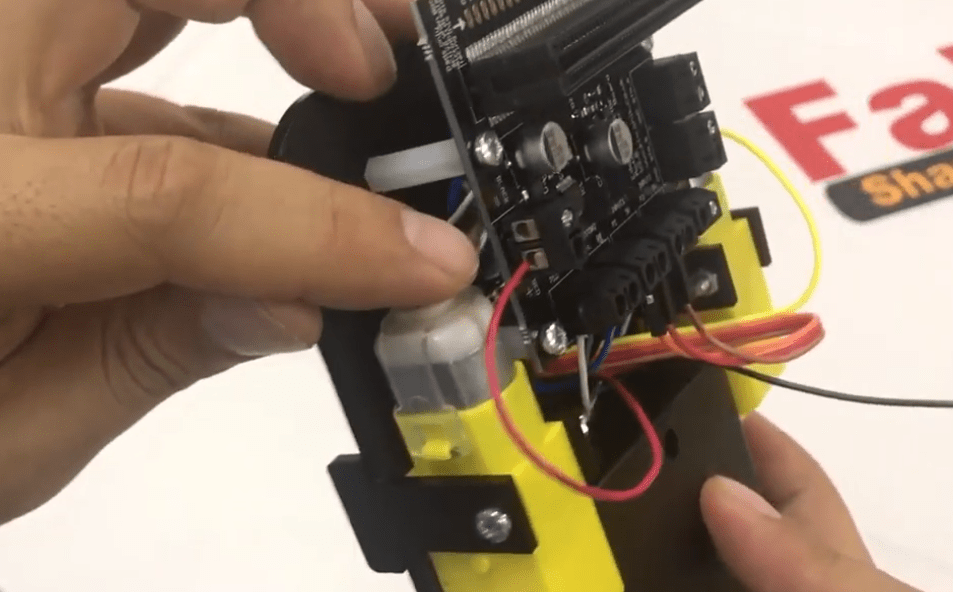
【STEP.12】電池ボックスを接続
シャーシの後方部分に電池ボックスを両面テープで接着します。電池ボックスからモーターコントローラーへ電源を供給するため、図のように配線を行います。
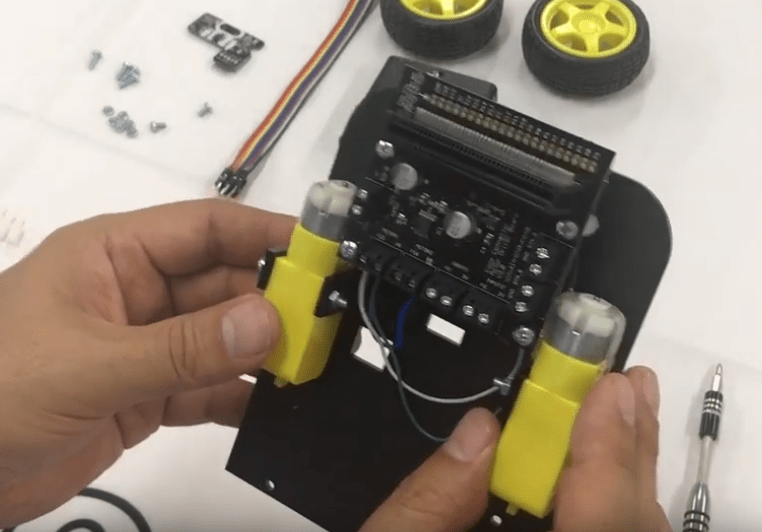
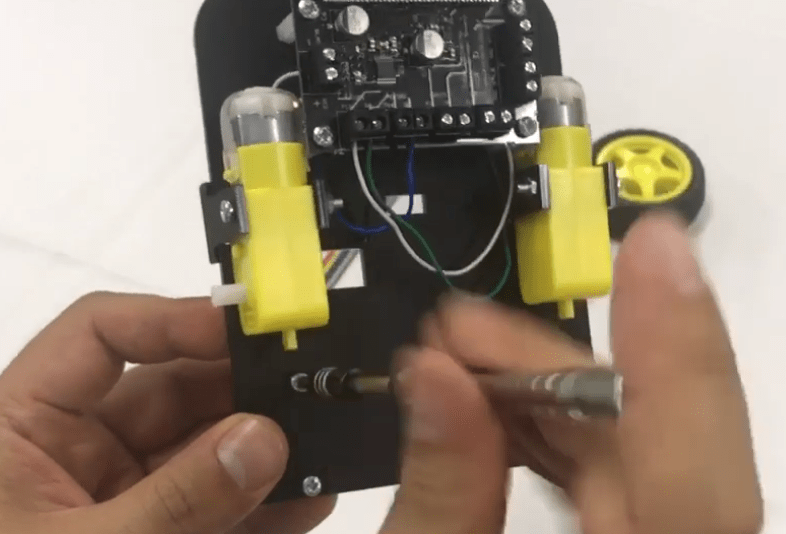
【STEP.13】タイヤを2個接続します。
タイヤをはめ込みます。ここで、先ほど仮止めにしていたモーターをドライバとラジオペンチでしっかりと固定します。かなり硬いため、机などの表面に押し当てて接続します。モータとシャーシにとめているマウンタが取れやすいので、接着してしまうのもよいかもしれません。
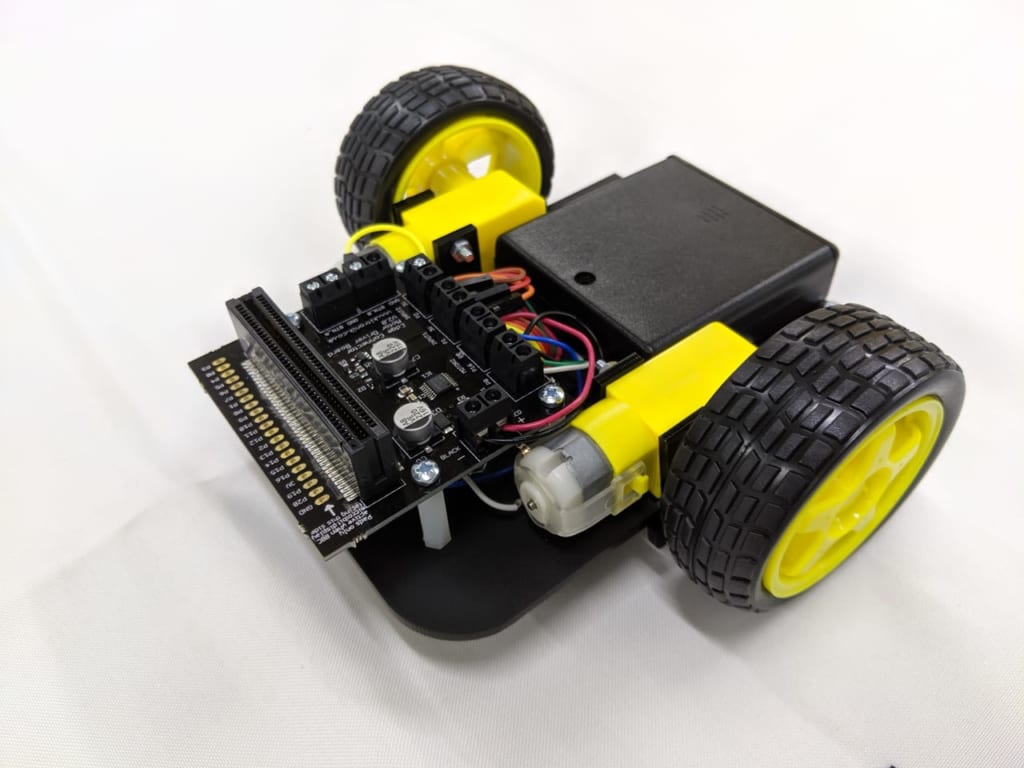
【完成】
タイヤは差し込みすぎるとシャーシに固定しているビスに接触することがありますので、差し込みすぎないように気をつけましょう。これで完成です。
以上のすべてのステップを動画としてもご覧いただけます。
完成したら早速サンプルコードをダウンロードしてテスト!
まずは、1個のmicrobitを使ってサンプルコードを使って動作させてみましょう。
サンプルコードはkitronik社の公式サイトにあります。
ファイルをダウンロードするには以下のリンクから、「Resources」の「Line following code.」クリックしてください。
ダウンロードファイルを解凍して、コンピュータに接続したmicrobitにデータを転送すれば動作テストが行えます。
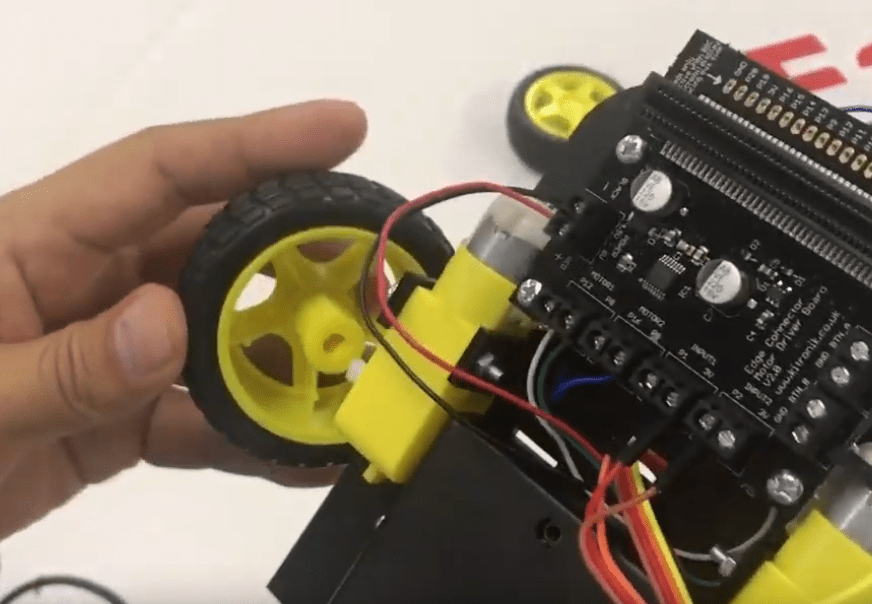
マイクロビットを図のように差し込んで、シャーシの底にある電源スイッチをONにします。

まずは手で持って動作テストします。
このプログラムはライントレースの基本的なプログラムになっています。そのため、センサを隠すと動作します。つまりはセンサが暗いと判断したときにモーターが回る仕組みになっています。
動作テストの際にはどのような動きになるかわからないので、まずは動画の様に本体をもって浮かせた状態でテストします。
サンプルコードをmakecodeで開くには?
サンプルコードがどのようになっているのか、makecodeで開いてみてみましょう。
まずは以下のURLから「makecode for microbit」のサイトへ移動します。
https://makecode.microbit.org/
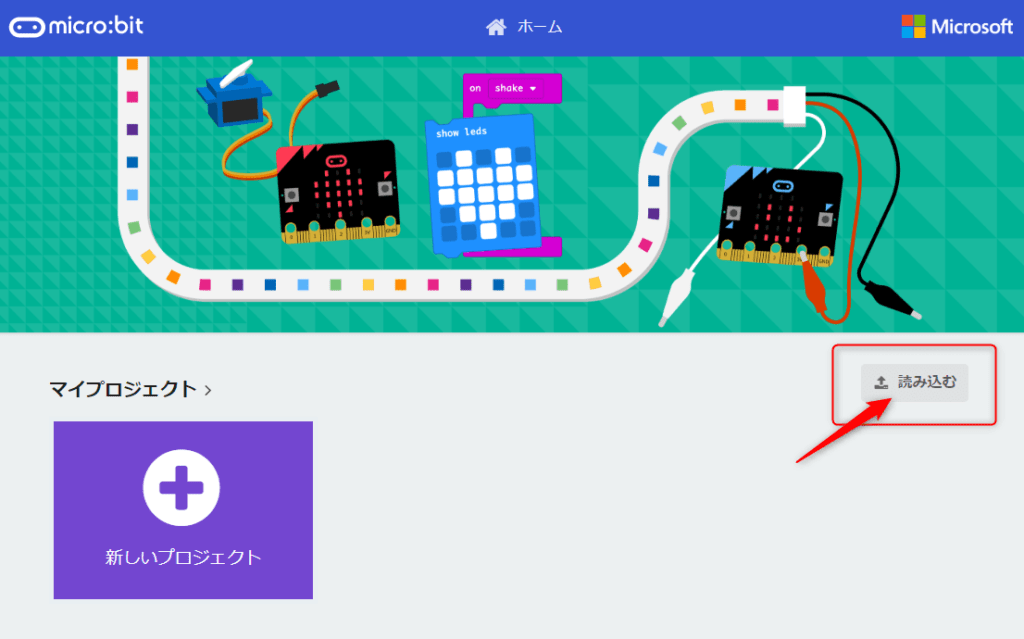
サイトが開くと以下の画面の様になりますので、右端の方にある「読み込む」ボタンをクリックします。
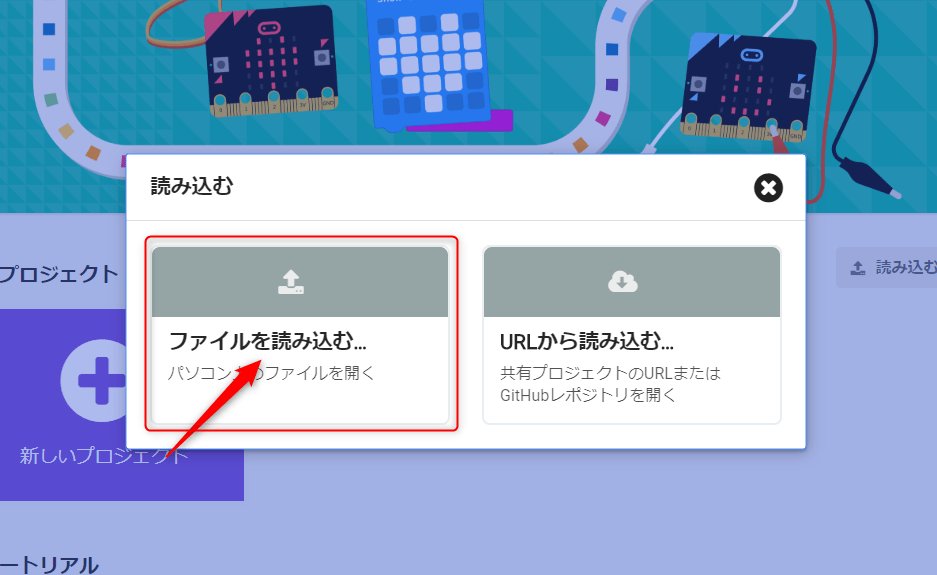
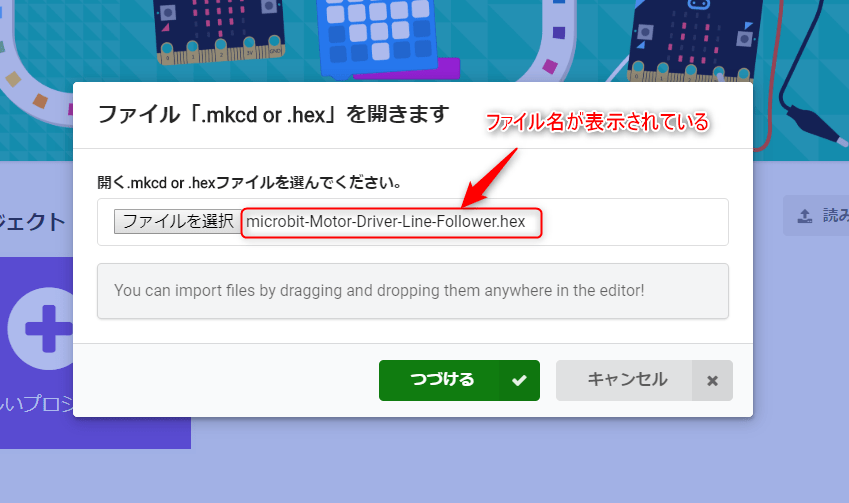
続いて「ファイルを読み込む」をクリックしてコンピュータの中から先ほどダウンロードしたファイルをクリックします。
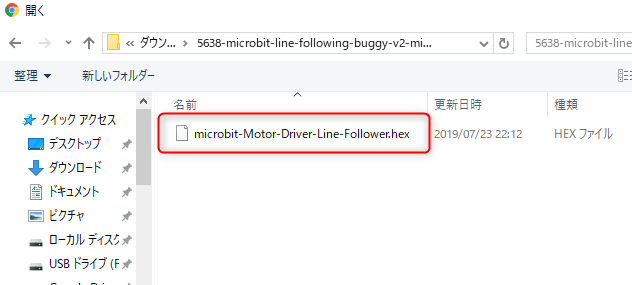
ファイル名が表示されているのを確認したら「づづける」をクリックすると読み込みが開始され、コードが表示されます。
以下のようにmakecodeの画面にコードが表示できました。
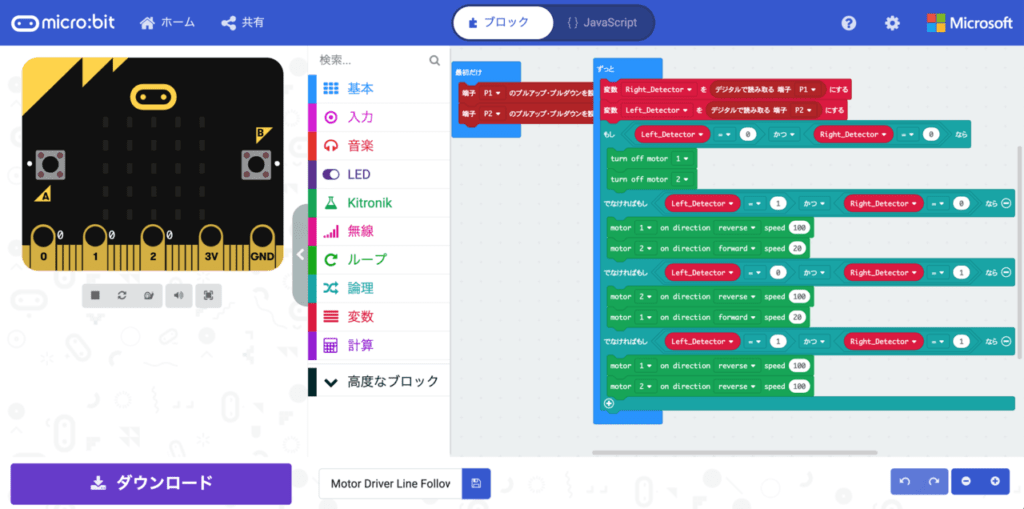
プログラムでは、モーター制御用のブロックとして「kitronik」というものを読み込んでモーターコントローラーの制御を行っています。このkitoronikというライブラリを読み込みことによってモーター制御を行うプログラムを簡単に組むことができるわです。
ここでは、テストまでを行いましたが、今後リモートコントロールのプログラムやジャイロを使った操作、そしてライントレースなどのプログラムを紹介してきます。
でカウントダウンタイマー")
でコントロールする信号機を作ろう!(プログラム編)")
")
{kind=link}